Clamp
Clamp
Bases: IntensityTransform
Clamp intensity values into a range \([a, b]\).
For more information, see torch.clamp().
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
out_min
|
float | None
|
Minimum value \(a\) of the output image. If |
None
|
out_max
|
float | None
|
Maximum value \(b\) of the output image. If |
None
|
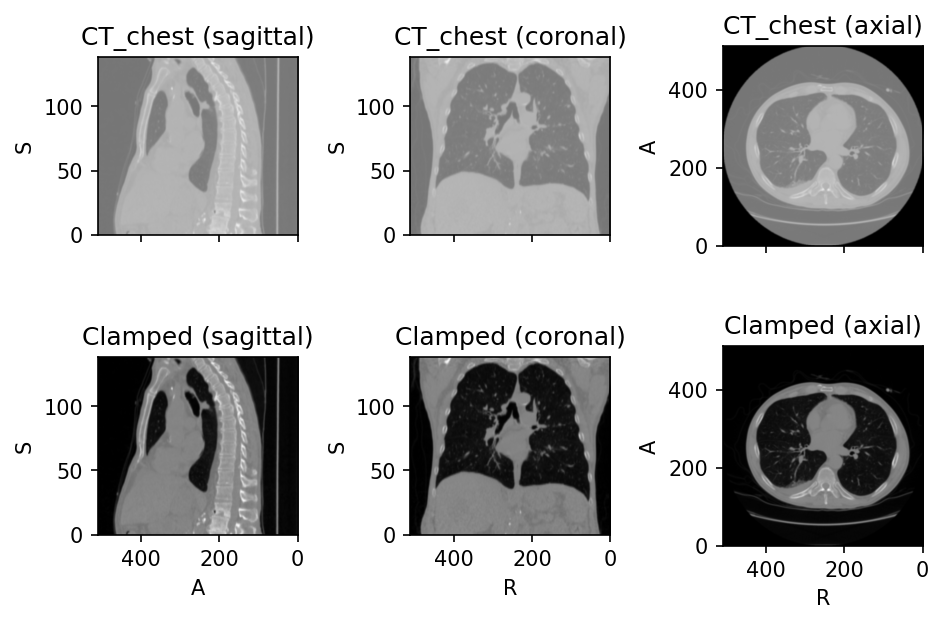
Examples:
>>> import torchio as tio
>>> ct = tio.datasets.Slicer('CTChest').CT_chest
>>> HOUNSFIELD_AIR, HOUNSFIELD_BONE = -1000, 1000
>>> clamp = tio.Clamp(out_min=HOUNSFIELD_AIR, out_max=HOUNSFIELD_BONE)
>>> ct_clamped = clamp(ct)
__call__(data)
Transform data and return a result of the same type.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
data
|
InputType
|
Instance of |
required |
get_base_args()
Provides easy access to the arguments used to instantiate the base class
(Transform) of any transform.
This method is particularly useful when a new transform can be represented as a variant
of an existing transform (e.g. all random transforms), allowing for seamless instantiation
of the existing transform with the same arguments as the new transform during apply_transform.
Note
The p argument (probability of applying the transform) is excluded to avoid
multiplying the probability of both existing and new transform.
add_base_args(arguments, overwrite_on_existing=False)
Add the init args to existing arguments
validate_keys_sequence(keys, name)
staticmethod
Ensure that the input is not a string but a sequence of strings.
to_hydra_config()
Return a dictionary representation of the transform for Hydra instantiation.
arguments_are_dict()
Check if main arguments are dict.
Return True if the type of all attributes specified in the
args_names have dict type.